
Algorithmen zur Schleifbearbeitung von Freiformflächen
(Diplomarbeit Kurzfassung)
| Prüfer: | Prof. Susanne Harms | ||
| 2. Prüfer: | Dipl.-Math. (FH) Matthias Güßmann | ||
| Externer Betreuer: | Dipl.-Math. (FH) Matthias Güßmann | ||
| Die Diplomarbeit wurde bei der Firma Itterheim Softwaretechnik -Beratung und Entwicklung- erstellt. | |||
|
Problemstellung |
||
| Im Bereich des Werkzeug- und Freiformschleifens können die zu bearbeitenden Geometrien sehr komplex sein.. Um solche Geometrien schleifen zu können werden sie in verschiedene Teilbereiche unterteilt, die nacheinander geschliffen werden. | 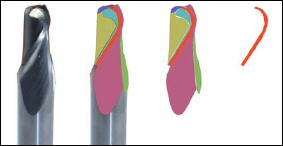 |
|
 |
Die Aufgabe bei dieser Diplomarbeit ist es Flächenbereiche in Verbindung mit einer gegebenen Schleifscheibe zu schleifen. Die betrachteten Positionen müssen dabei flächen- und werkstückskollisionsfrei bearbeitet werden. | |
| Die Eingangsdaten sind hierbei die Geometrieinformationen der Schleifscheibe und der zu schleifenden Fläche. Die Untersuchungen werden für parametrische sowie diskrete Daten durchgeführt. Für die Implementation wird auf den diskreten Fall zurückgegriffen, da sich parametrische Daten leicht in diskrete Daten konvertieren lassen. | ||
| Durchführung |
|
|
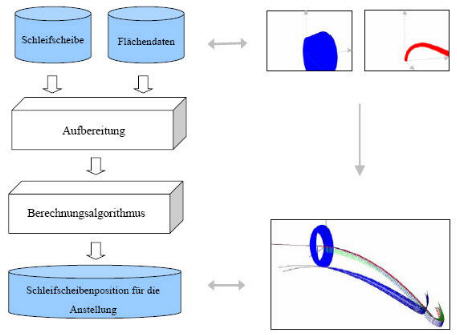
Bei der Durchführung
wird ein Algorithmus verwendet, der wie folgt veranschaulicht werden kann. |
|
 |
|
Aus den gegebenen Eingangsdaten (Schleifscheibe und Flächendaten) wird mittels einer Datenaufbereitung ein Datensatz ermittelt, welcher an den eigentlichen Berechnungsalgorithmus übergeben wird. Durch die Aufbereitung der Daten kann eine Ausgangslage geschaffen werden, die gleichbleibende Bedingungen für die Berechnung garantiert. Für die Anstellberechnung werden Transformationen, Schnitt- und Krümmungs-berechnungen sowie die eigentliche Kollisionsbetrachtung verwendet. Die Transformationen werden für die Verbindung von Flächen- und Schleifscheibenbereich verwendet. Dies ist von Interesse, da bestimmte Berechnungen im Schleifscheibenbereich durchgeführt werden und die Ergebnisse in den Flächenbereich übertragen werden müssen und umgekehrt. Die Krümmungs- und Schnittberechnungen werden benutzt, um in der Kollisionsprüfung Methoden herzuleiten, mit denen eine Kollision festgestellt werden kann. Des weiteren werden hieraus Vorgehensweisen erstellt mit denen im Falle einer Kollisionsfeststellung eine Position gefunden wird in der keine Kollision vorliegt. Unterschiede bei den Strategien der Kollisionsvermeidung ist die Ermittlung der Richtung und Länge in der die Schleifscheibe verschoben werden muss. Durch technologische Gegebenheiten können solche Richtungen auch vorgegeben werden, z.B. wenn sich die Schleifscheibe nur um bestimmte Achsen drehen bzw. verschieben kann. |
|
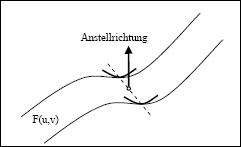
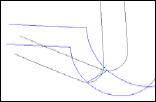
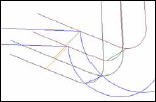
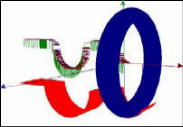
Die nebenstehenden
Bilder zeigen eine Situation, in der eine Kollision festgestellt wird (oben)
und eine mögliche Ausgleichsposition (unten).
Hierbei wird eine
Ausgleichsbewegung in Richtung der Flächennormale gewählt.
Alternativ könnte hier
eine senkrechte Abhebung nach oben gewählt werden.
|
|
| Zusammenfassung/Ausblick |
|
|
Durch den in der
Diplomarbeit erarbeiteten Algorithmus, lassen sich Flächenbereiche in
Verbindung mit einer gegebenen Schleifscheibe schleifen. Um komplexe
Geometrien schleifen zu können müssen diese in verschiedene einfache
Teilbereiche zerlegt werden, die dann bearbeitet werden.
Um einen gleichmäßigen
Verlauf der Schleifscheibe gewährleisten zu können müssen Ecken mit einen
minimalen Radius verrundet werden.
Durch die Verrundung
kann es vorkommen, dass Material stehen bleibt, welches eigentlich mit
abgetragen werden sollte, dies ist besonders in Innenecken der Fall. Eine
Vorgehensweise die zukünftig hier einsetzen könnte würde eine andere
Schleifscheibe vorschlagen, mit welcher die Fläche genauer geschliffen wird.
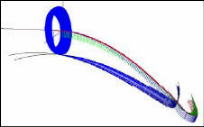
Die folgenden Bilder
zeigen nun noch ein paar Flächen, die mit dem Algorithmus bearbeitet werden. |
 |
 |
 |
Konturzug - Modellierung
(Praktikum ISBE)
|
Aufgabenstellung war die Modellierung und Implementierung eines Modules, mit dem man eine Kontur aus Kreis- und Geradenstücken modellieren kann.
Für die Realisierung wurde mit Visual C++ und Windows-Grafikfunktionen verwendet, ausserdem kamen die Microsoft Foundation Classes (MFC) und die Active Template Library (ATL) zum Einsatz. |
||
| Anwendungsbeispiel |
||
Ausgangssituation: |
Es wurde eine Kontur aus mehreren Strecken modelliert, so dass eine Spitze entstanden ist, welche nun abgerundet werden soll.
Hierzu werden die zwei Strecken ausgesucht, die verrundet werden sollen. |
|
Durchführung: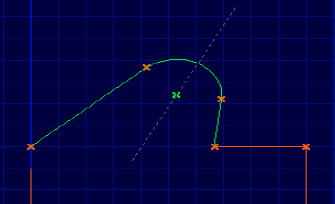 |
Nachdem die beiden Strecken der Spitze ausgewählt wurden, sieht man den abgerundeten Kreisbogen.
Jetzt kann man am grün gekennzeichneten Mittelpunkt den Radius des Kreises (via Mausbewegung) verändern.
Hierbei findet immer eine Projektion der Mauskoordinaten auf die getrichelte Winkelhalbierende statt, um definierte Randbedingungen nicht zu variieren.
|
|
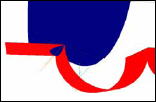
Extremas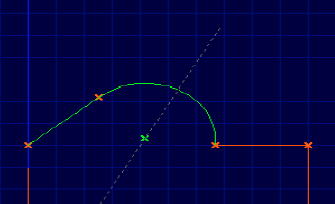 |
In diesem Bild sieht man nun eines der Extremas, die für den eingefügtem Kreis möglich sind. Der Kreis kann
hier nich weiter vergrößert werden, da die Grenzen der Ausgangsstrecke (rechts, Befrenzung durch waagrechte, rote Strecke) erreicht sind.
|
Gabelstapler-Animation
(Studienarbeit)
| Die Studienarbeit wurde während des 3. Semesters in Begleitung zur
Vorlesung "Grafische Datenverarbeitung" angefertigt. Gefordert war die Animation von Objekten, außerdem sollte man interaktiv auf das Geschehen Einfluss nehmen können. |
|
| Für meine Arbeit habe ich dabei einen Gabelstapler in einer
(vereinfachten) Lagerhalle gewählt.
Die Anwendung hat zwei verschiedene Modi, der eine ist eine Simulation, der andere eine eigene Steuerung. Im Simulationsmodus wird per Zufallsgenerator eine Kiste gewählt und dann an eine andere zufällige, freie Position verschoben. Im Entscheidungsmodus kann in einem separatem Steuerungsfenster die Kiste gewählt werden, die verschoben werden soll und die Zielposition festgelegt werden. |
|
| Weitere Interaktionsmöglichkeiten:
|
